I dette afsnit stilles og besvares følgende spørgsmål:
1. Hvad betyder det at indregulere en proces? 2. Hvorfor er det nødvendigt at indregulere en proces? 3. Hvilken fremgangsmåde bruges der når en proces skal indreguleres?
Processen er designet (fysisk) til at opfylde nogle bestemte krav f.eks. levere en konstant flow mænge (ønskeværdi/setpunkt) eller opretholde en konstant temperatur (ønskeværdi/setpunkt) i et lokale eller en beholder. Det at indregulere en proces betyder at der skal vælges de “rigtige” værdier for parametre til reguleringsligningen sådan at de krav der stilles til processen bliver opretholdt. Udover at opretholde ønskeværdien skal processen være stabil og reagere på en bestemt måde dvs. opfylde de krav der er stillet til processen, når belastning ændres eller forstyrrelser forekommer. Til at opnå dette er indregulering af processen nødvendig.
Når er proces skal reguleres er det nødvendigt at selve regulatoren er indstillet korrekt og alle regulatorens parametre passer til processen.
Der findes mange indreguleringsmetoder og i dette afsnit bliver nogle af de mest brugte gennemgået. Til at vise virkemåden vises metoden både med SimView samt FactoryTalk View som er Rockwells HMI - Husk at bruge link til Youtube videoer.
Formålet med indreguleringsmetoder er at give “første bud” på Reguleringsparametrene for Proportional, Integral og Differentiel leddene, som derefter skal fintunes. Her forneden vises regulator ligningen og reguleringsparametrene der skal indstilles.
(1)
(2)


Det metoder der bliver gennemgået her er følgende:
1. Ziegler-Nichols, lukket sløjfe metode. 2. Good Gain metoden. 3. Forsøgsmetode. 4. Trin-svar metoden 5. Andre metoder.
Ziegler-Nichols, lukket sløjfe metode (1942):
I 1942 udgav J.G. Ziegler og N.B. Nichols en artikel der fik navnet “Optimum Settings for Automatic Controllers”. Der fremviser de en metode til at finde de optimale værdier for en regulator. Denne metode findes i fleste litteratur om reguleringsteorien og bliver denne gennemgået her.
Processen skal kunne kunne tåle stående svingninger når disse er opnået, registreres den værdi for Kp (proportional forstærkning) der skal til at opnå disse svingninger. Tiden mellem bølge toppe, Tk, skal også registreres. Når disse to parametre er blevet registreret kan værdierne for Kp, Ki og Kd aflæses fra tabelværdier.
Fordele ved metoden: Metoden er nem at forstå og den kræver ikke kendskab til processen (analyse). Ulemper ved metoden: Processen udsættes for stående svingninger og ikke alle processer kan tåle det. Der er også fare for at processen bliver ustabil når de stående svingninger skal opnås.
Denne proces kan deles op i 3 trin:
- Øg proportional forstærkningen, Kp (i trin) indtil stående svingninger er opnået. Hver gang Kp ændres skal der foretages ændring i SP (ønskeværdien). Når stående svingninger er opnået, registrer Kp som Kp, krit
- Mål svingningsperioden (tid mellem to bølgetoppe) og registrer som Tk.
- Brug tabel til at aflæse værdier for Kp, Ti og Td.
- Brug fintuning af parametre.
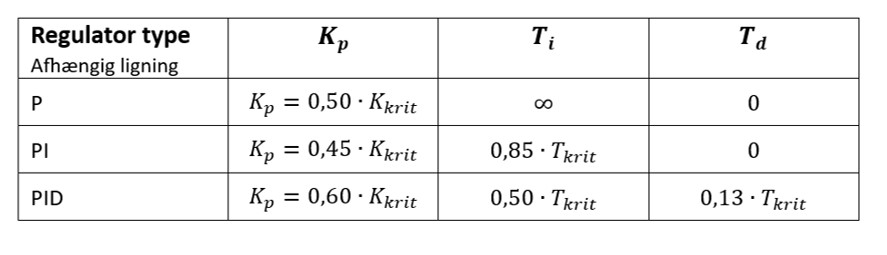
Hvis den uafhængige ligning bruges skal disse værdier regnes om (dividere med Kp). Der henvises til Youtube videoer senes i afsnittet.
Good Gain metoden:
Her kræves der ikke en analyse af Processen der skal indreguleres. Processen er stabil gennem hele processen som er en fordel over Z-N metoden.
Fordele ved metoden: Den er hurtig og nem at bruge og her laves der ingen antagelser om processens linearitet. der stilles ingen krav til operatøren (ingeniøren) om at kende processen i detaljer. Processen er stabil i indreguleringsforløbet. Dog skal det nævnes at det er altid en stor fordel at lære processen godt at kende før indreguleringsprocessen påbegyndes.
Ulemper ved metoden: Her indreguleres processen uden viden om hvordan den reagerer til forskellige inputværdier. Det anbefales, alligevel, at lære processen godt at kende før denne metode bruges. Dette kan f.eks. gøres med at bruge trininput og undersøge trinsvar.
- Regulatoren skal sættes i manual mode (åben sløjfe) og skal CV signalet (CV_man) indstilles sådan at processen er tæt på det ønskede værdi.
- Regulatoren indstilles som en P-regulator med Ki og Kd = 0. I starten kan Kp kan sættes til 1, dog afhængigt af processen.
- Regulatoren sættes nu i auto mode (lukket sløjfe) og Kp ændres indtil der registreres et mindre oversving og et “undersving” på PV. Registrer dette Kp værdi som Kp_gg.
- Mål tiden mellem de to bølgetoppe dvs. oversving og “undersving” og registrer som T_ou.
- Parametrene kan nu beregnes ud fra nedenstående ligninger.
(3)

Forsøgsmetode (trial and error method):
Her bruges ikke nogen bestemte regneregler eller tabeller som i mange andre indreguleringsmetoder. I stedet prøver operatøren (eller ingeniøren) sig frem med ændringer i de forskellige parametre indtil kravene til indreguleringen er opfyldt.
Fordele ved metoden: Den er hurtig og nem at bruge og her laves der ingen antagelser om processens linearitet. der stilles ingen krav til operatøren (ingeniøren) om at kende processen i detaljer, dog skal det nævnes at det er altid en stor fordel at lære processen godt at kende før indreguleringsprocessen påbegyndes.
Ulemper ved metoden: Her indreguleres processen uden viden om hvordan den reagerer til forskellige inputværdier. Det anbefales, alligevel, at lære processen godt at kende før denne metode bruges. Dette kan f.eks. gøres med at bruge trininput og undersøge trinsvar.
- Regulator indstilles til auto mode (lukket sløjfe) med Kp = 1, dog afhængigt af processen.
- Nu øges Kp indtil processens PV viser mindre svingninger dog IKKE STÅENDE SVINGNINGER. Kp registreres nu som Kp_u og halveres og bruges videre til næste trin..
- Nu øges Ki indtil processens PV viser mindre svingninger. Ki registreres nu som Ki_u.
- Følgende ligninger kan nu bruges til reguleringsparametrene.
(4)

Trin-svar metode:
Denne indreguleringsmetode er ofte kaldt lambda-metode. Her skal processen analyseres før indreguleringen påbegyndes.
Fordele ved metoden: Der skal laves en analyse af processen dvs. processen skal kendes før indreguleringsprocessen påbegyndes. Resultatet, efter indreguleringen, giver et respons der ikke har svingninger.
Ulemper ved metoden: Ikke altid muligt at udføre en god analyse af en proces der er kørende men metoden skal dog kunne bruges til fleste processer.
- Regulator indstilles til manual mode (åben sløjfe).
- Cv signalet (CV_man) bruges til at give et trin-input til processen og responset undersøges.
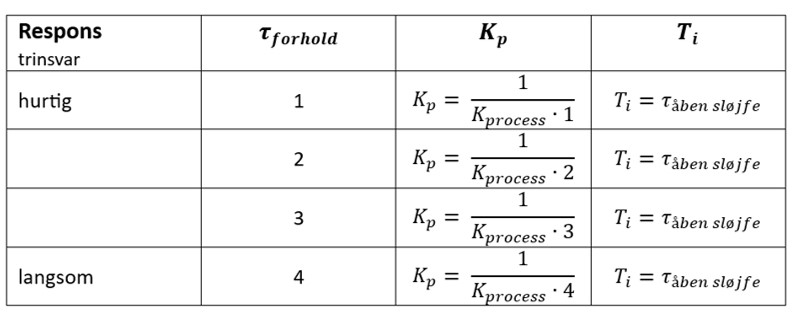
- Procesforstærkningen (K_proces) og processens tidskonstant findes ud fra proces responset.
- Der bestemmes et ønsket respons for processen (lukket sløjfe respons) ved at definere tidskonstant for den lukkede sløjfe (lambda).

(5)

(6)

(7)

(8)

(9)





Nu kan tabellen her forneden bruges til at bestemme Kp og Ki.
Her for neden vises der link til websidens Youtube kanal om indreguleringsmetoder.
Video – Indreguleringsmetoder video 1-5